About ibesom
[ Remote control]
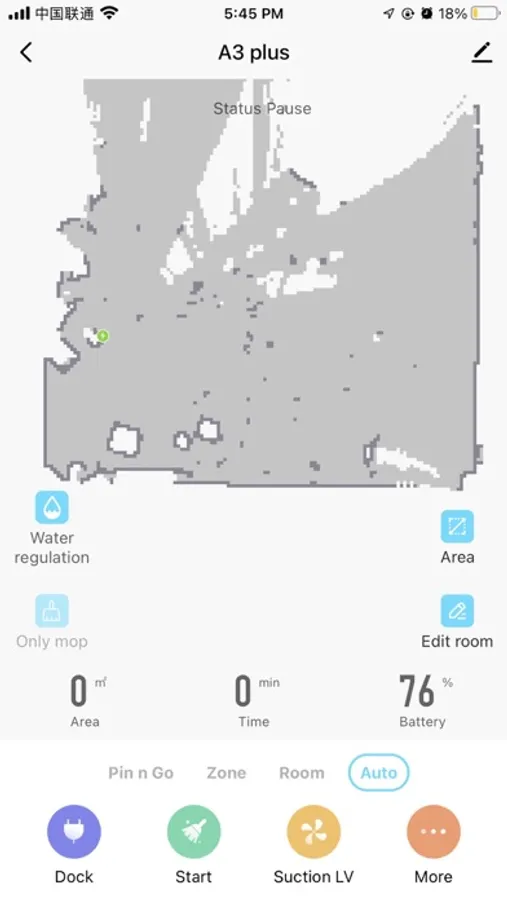
Users can connect the sweeping robot through the APP, control the work of the robot anytime and anywhere, and check the cleaning path and cleaning information in real time.
[Map saving]
Enable the map saving mode, and perform operations according to regulations to achieve room division, merger, and division functions, to achieve fixed-point cleaning and improve cleaning efficiency.
[sweep]
Click the location to be cleaned on the map, and the robot will automatically plan the path to the target point for cleaning, providing more flexibility.
[Virtual Walls and Forbidden Zones]
After setting the virtual wall and restricted area, the robot will not cross the virtual wall or enter the restricted area when cleaning.
[Regular cleaning]
Scheduled cleaning tasks are scheduled. The robot will start cleaning at the specified time and automatically return to the charging base after completion.
[break point continue scan]
When the power is lower than 20%, the robot will automatically plan a short path to return to the charging base to charge. When the power is fully charged, the robot will automatically return to the unfinished area to continue cleaning.
Users can connect the sweeping robot through the APP, control the work of the robot anytime and anywhere, and check the cleaning path and cleaning information in real time.
[Map saving]
Enable the map saving mode, and perform operations according to regulations to achieve room division, merger, and division functions, to achieve fixed-point cleaning and improve cleaning efficiency.
[sweep]
Click the location to be cleaned on the map, and the robot will automatically plan the path to the target point for cleaning, providing more flexibility.
[Virtual Walls and Forbidden Zones]
After setting the virtual wall and restricted area, the robot will not cross the virtual wall or enter the restricted area when cleaning.
[Regular cleaning]
Scheduled cleaning tasks are scheduled. The robot will start cleaning at the specified time and automatically return to the charging base after completion.
[break point continue scan]
When the power is lower than 20%, the robot will automatically plan a short path to return to the charging base to charge. When the power is fully charged, the robot will automatically return to the unfinished area to continue cleaning.
ibesom Screenshots
Tap to Rate: